1. 목적
지면 높낮이가 다른 환경(경사면, 계단, 불규칙 지형 등)에서 캐릭터의 발이 공중에 뜨거나 파묻히지 않도록 보정하기 위함이다.
기본 애니메이션은 유지하면서, 실시간으로 지면을 감지해 발 위치와 골반(Pelvis)을 보정한다.
2. 전체 처리 흐름
단계 1 — AnimBlueprint에서 IK 실행 여부 판단
- 이동 상태, 공중 여부 등을 체크
- IK 적용이 필요한 경우에만 Control Rig 실행
- 예: 걷기 / 뛰기 상태
- 점프 중일 때는 비활성화
→ 조건을 통과하면 IK_FootRig(Control Rig)을 실행한다.
단계 2 — Control Rig 에셋을 통해 내부 처리
Control Rig 안에서 좌/우 발을 각각 처리한다.
① 현재 발 위치 기준 지면 검사 (Hit Trace)
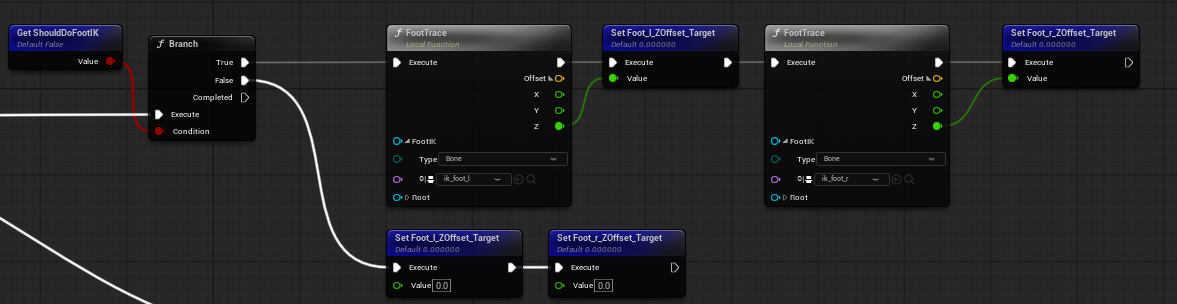
② 발 보정값 계산
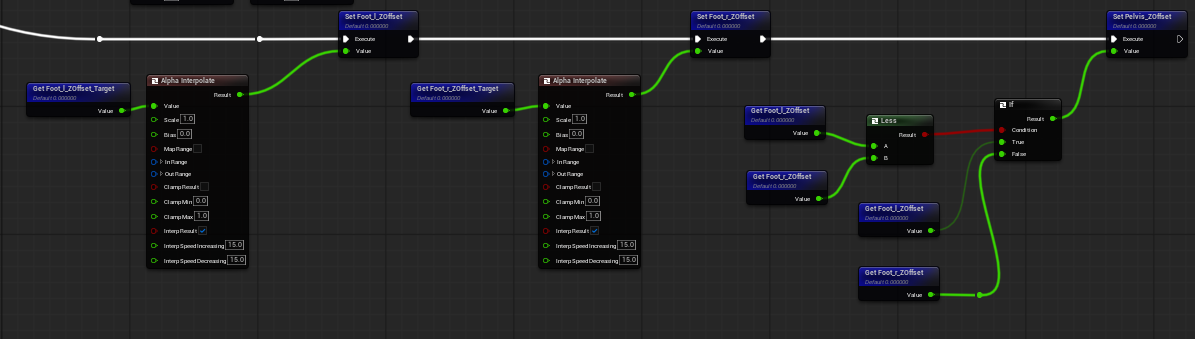
③ Pelvis(골반) 보정

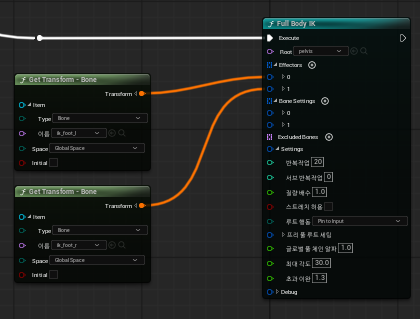
④ IK 적용
3. 정리된 전체 흐름 다이어그램
AnimBP
└─ IK 실행 조건 체크
└─ Control Rig 실행
├─ 좌/우 발 위치 획득
├─ 지면 Trace
├─ 발 Offset 계산
├─ Pelvis 보정
├─ IK 적용
└─ Pose 반환
4. 결과

높낮이가 다른 환경에서 발 보정이 되는것을 확인
'IT > 언리얼_포트폴리오' 카테고리의 다른 글
| 3일차. GAS 기반 애니메이션 레이어 구조 설계 (0) | 2026.02.15 |
|---|---|
| 2일차. GAS 입력 바인딩 구조 설계 (GameplayTag 기반 입력 추상화) (0) | 2026.02.15 |
| 1일차. AAA급 액션 RPG를 목표로, 언리얼 5.6 + GAS로 시작 (0) | 2026.02.11 |


